В данной статье мы рассмотрим шаговый двигатель постоянного тока, подробно разберем принцип работы, конструкцию и управление, а так же разберем один из чипов управления.
Использование шаговых двигателей в производстве
Шаговые электродвигателя представляют собой бесколлекторные синхронные импульсные двигатели. Поворот ротора на определенный угол и установка его в заданном положении осуществляется за счет поступающих в возбуждающую обмотку статора управляющих импульсов. В результате протекания импульсного потока через обмотку меняется ориентация магнитного поля между полюсами статора и создается механическое поворотное усилие. Необходимые угловые перемещения или шаги ротора производятся последовательной активацией обмоток статора. У шаговых двигателей купить отсутствует пусковая обмотка, т.к. используется частотный пуск, и для осуществления установки ротора в нужную позицию нет необходимости в датчике положения. Отсутствие коллектора повышает надежность и долговечность устройства.Приборы такого типа применяются в промышленности в качестве исполнительных устройств.
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Принцип работы шаговых двигателей
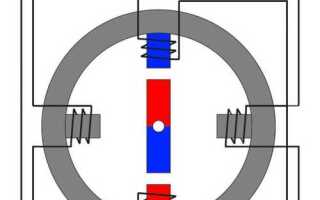
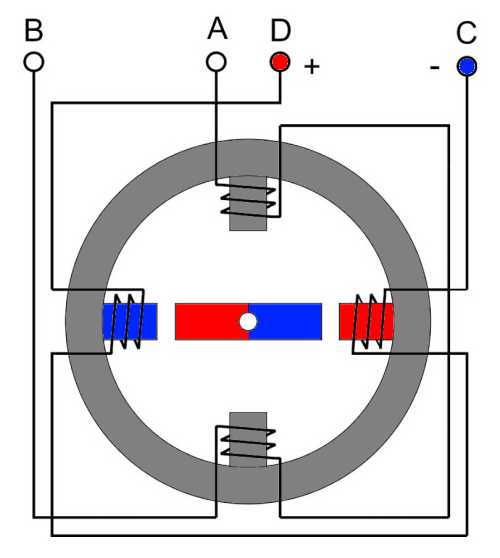
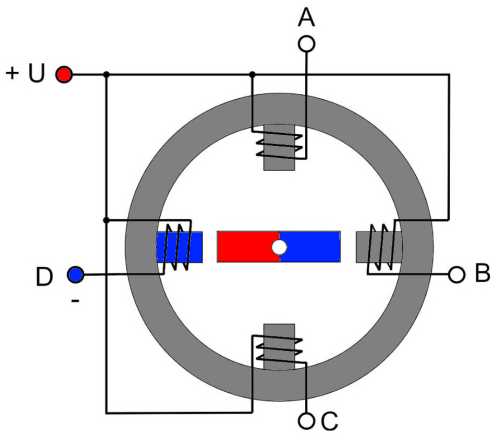
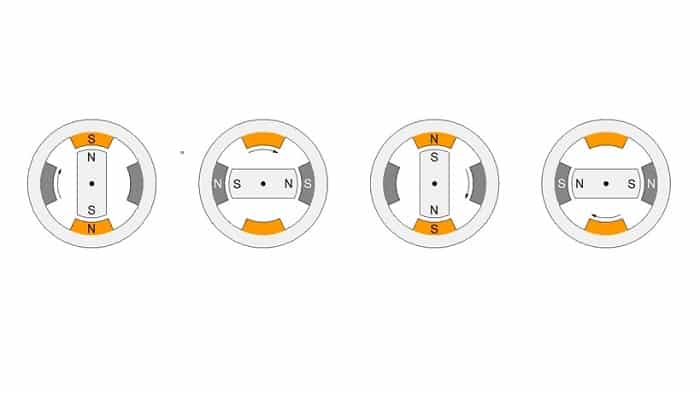
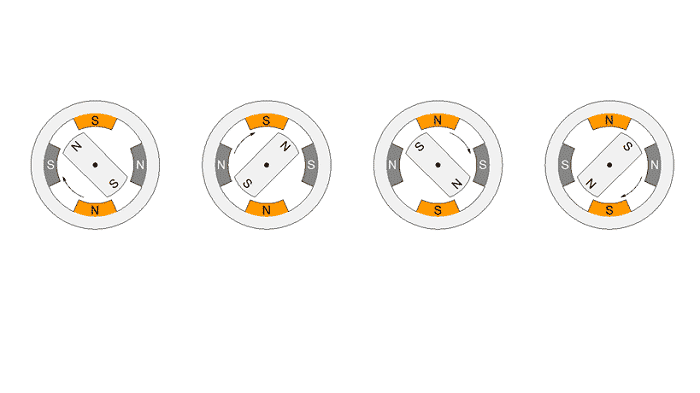
Представьте себе двухполюсный постоянный магнит на валу двигателя – это ротор, окруженный замкнутым магнитопроводом с четырьмя обмотками — статор. Вернее это две обмотки AB и CD с половинками, расположенными на противоположных полюсах статора.
Подключили к источнику напряжения обмотку AB (полярность + -) как показано на рисунке. Ток в этой обмотке вызовет появление магнитного поля статора с полюсами сверху N, снизу S. Как известно разноименные полюса магнитов притягиваются. В результате ротор (постоянный магнит) займет положение, в котором оси магнитных полей ротора и работающих полюсов статора совпадают. Механическое положение будет устойчивым. При попытке сдвинуть ротор, возникнет сила, возвращающая его назад.
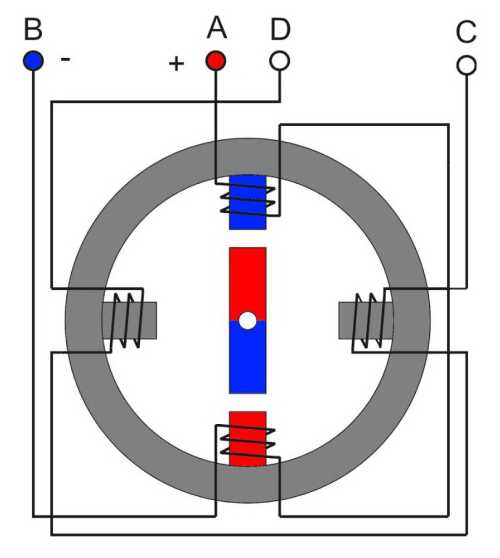
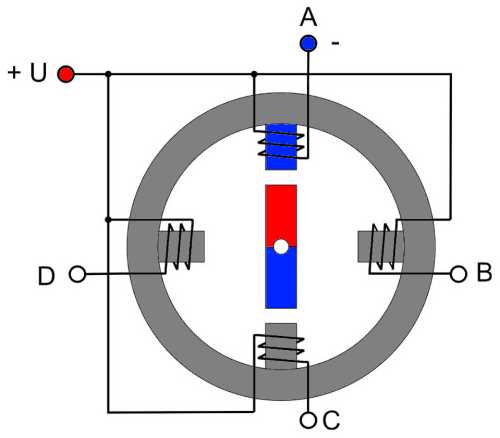
Теперь снимем напряжение с обмотки AB и подадим на обмотку CD (полярностью + -). Ток в обмотке CD вызовет магнитное поле с горизонтальными полюсами, слева S, справа N. Магнитное поле делает все, чтобы магнитный поток замкнулся по минимальному пути. Ротор повернется в положение указанное на рисунке. Механическое положение ротора опять устойчивое. Это был первый шаг двигателя. В нашем случае он равен одной четвертой оборота.
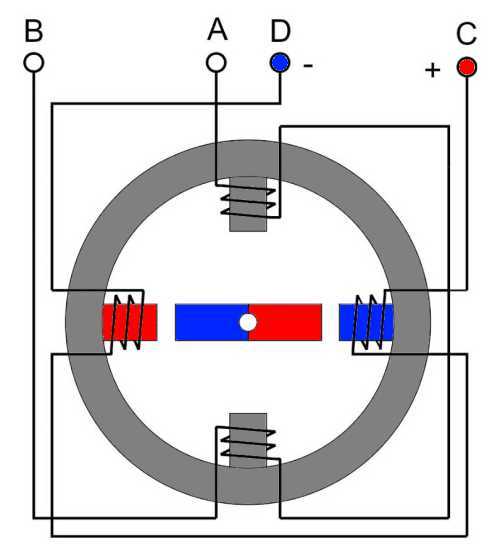
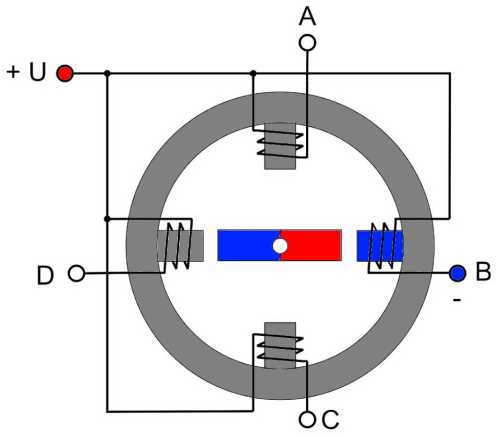
Отключаем обмотку CD и подаем напряжение опять на обмотку AB, но уже в другой полярности (- +). Опять магнитное поле статора повернется на 90°, а за ним и ротор.
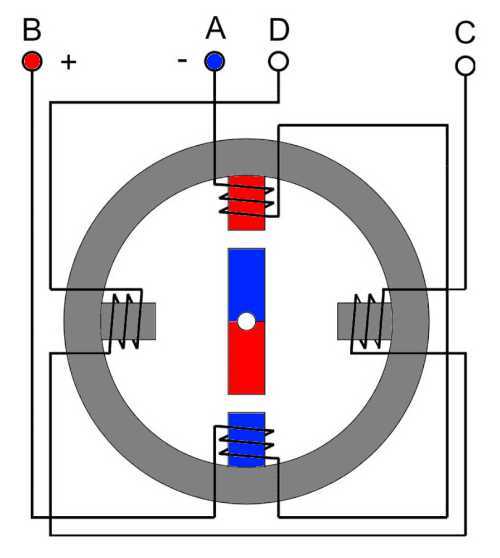
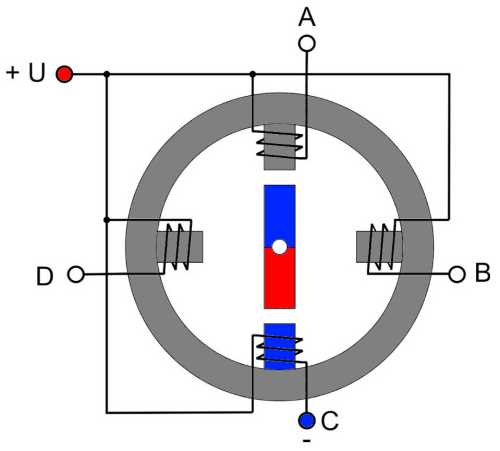
Еще одна коммутация AB — отключаем, CD — подключаем (полярность — +) и ротор совершает еще один шаг на одну четвертую окружности. Следующая коммутация (с которой мы начали) вернет ротор в исходное положение. Мы сделали полный поворот за 4 шага. Если продолжить переключение фаз, ротор будет вращаться с частотой, пропорциональной частоте переключения фазных обмоток. Если коммутировать фазы в противоположной последовательности – крутиться в обратном направлении, прекратить коммутацию — остановится.
Биполярные и униполярные шаговые двигатели
Это был биполярный шаговый двигатель. Биполярный двигатель имеет по одной обмотке для каждой фазы. На предыдущих рисунках это обмотки AB и CD. Для изменения магнитного поля должна обеспечиваться сложная коммутация обмоток. Каждая обмотка: • отключается от источника напряжения, • подключается в прямой полярности • подключается с противоположной полярностью.
Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема L298N. Микросхема обеспечивает ток коммутации до 2 А. Если нужны большие токи, то задача управления биполярным двигателем еще усложняется.
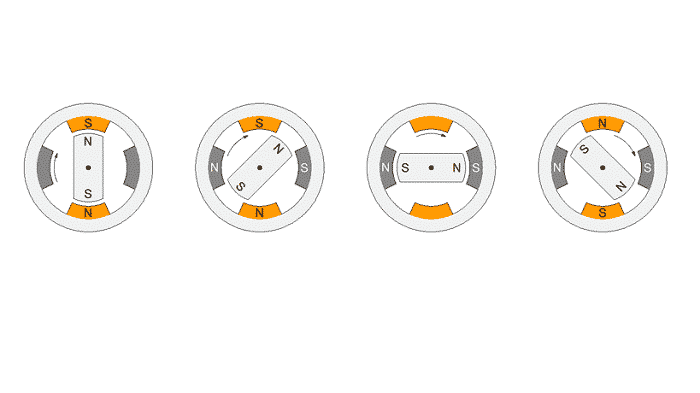
Существует другой способ изменения магнитного поля в статоре с гораздо более простой схемой коммутации. Это применение двигателя с униполярными обмотками. Схема двух фазного шагового двигателя с униполярными обмотками и последовательность коммутаций обмоток выглядит так.
У всех четырех обмоток один вывод подключен к плюсовому выводу источника питания. А другие выводы A,B,C,D последовательно коммутируются к минусовому сигналу. Соответствующие обмотки создают магнитное поле, и ротор поворачивается вслед за ним.
Для коммутации обмоток таким способом достаточно четырех ключей, замыкающих обмотки на землю. Ключи часто управляются непосредственно с выводов микроконтроллеров. Иногда средние выводы обмоток конструктивно объединены внутри двигателя, иногда выводятся все выводы отдельно. Кстати, это не повод называть двигатель четырехфазным. Все равно он будет двухфазным.
Биполярный двигатель обеспечивает, при тех же размерах, больший крутящий момент, по сравнению с униполярным. Оно и понятно. Одновременно в униполярном двигателе работает только одна обмотка, вместо двух. Выигрыш в моменте у биполярного составляет около 40%. Зато, если нет необходимости использовать двигатель на полную мощность, униполярным двигателем гораздо проще управлять.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Чип управления шаговым двигателем SAA1027

В этом уроке о вращательных приводах, мы рассмотрели шаговый двигатель в качестве электромеханического привода, который может быть использован в качестве устройства вывода для позиционной или скорости управления.
В следующем уроке об устройствах ввода / вывода мы продолжим наш взгляд на устройства вывода, называемые исполнительными механизмами, и в частности те, которые снова преобразуют электрический сигнал в звуковые волны с помощью электромагнетизма.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Реактивный шаговый двигатель
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.

Униполярное волновое управление
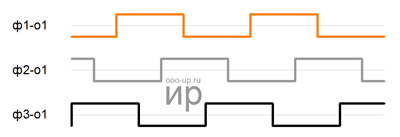
Биполярное полношаговое управление
Биполярное 6-шаговое управление
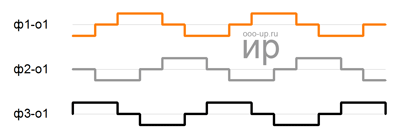
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
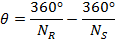 ,
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
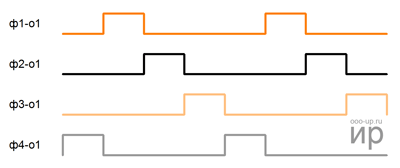
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор .
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
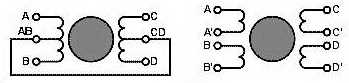
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
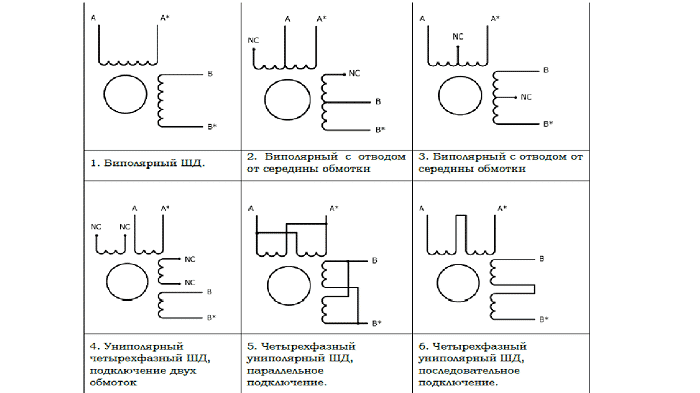 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
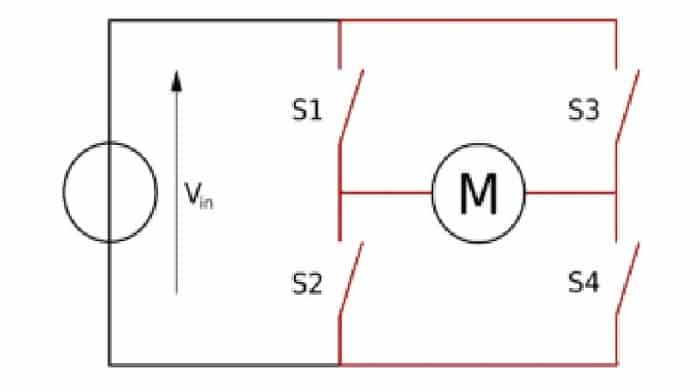 Схема Н-моста
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
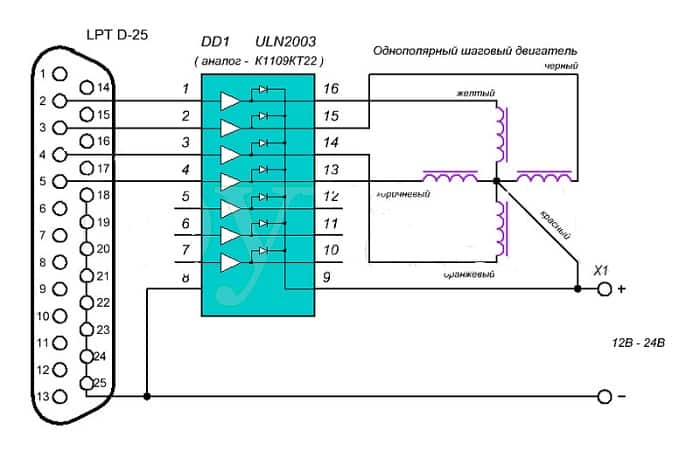 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
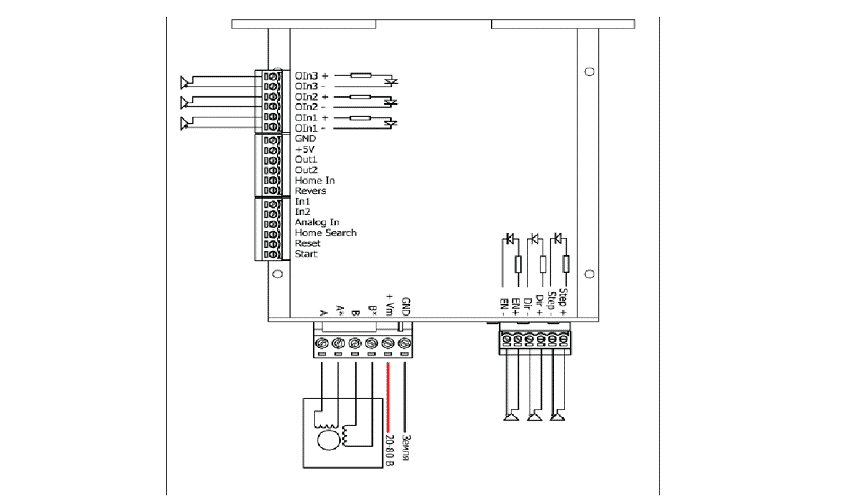 Схема управления от контроллера с дифференциальным выходом
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
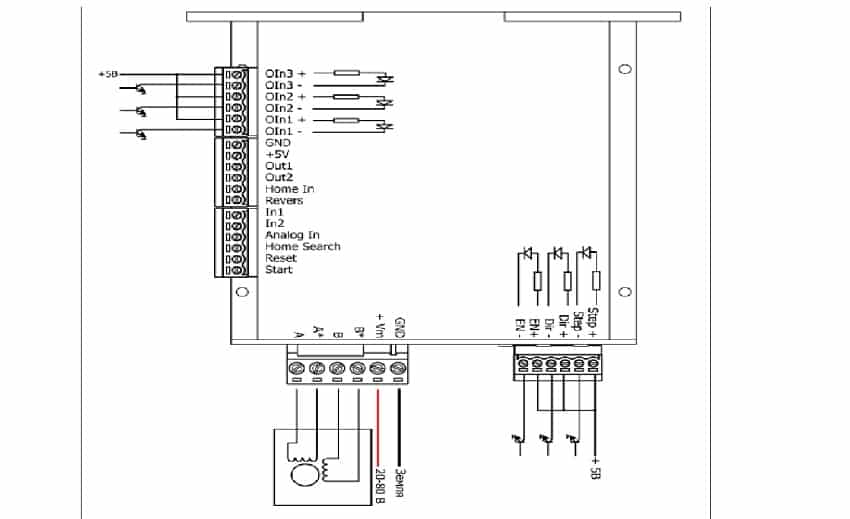 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
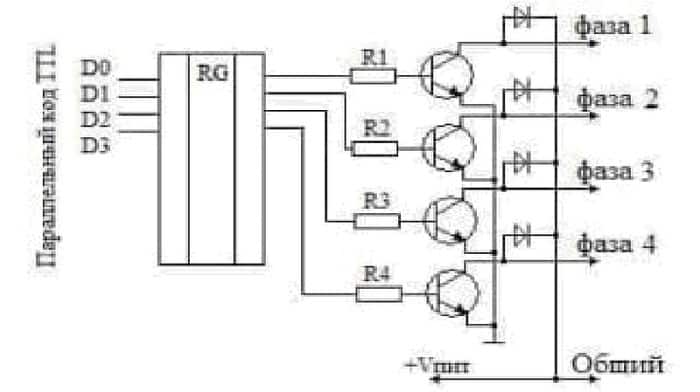 Схема простейшего драйвера
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.