В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Как работает бесколлекторный двигатель?
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Описание и принцип работы
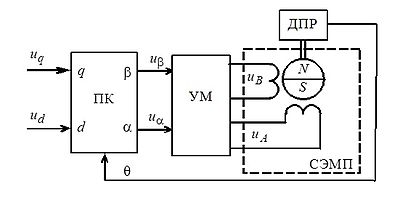
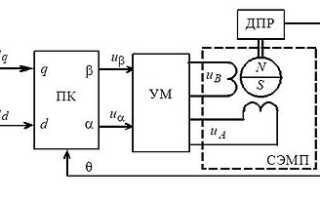
Рис. 2. Структура двухфазного вентильного двигателя с синхронной машиной с постоянными магнитами на роторе.
ПК — преобразователь координат, УМ — усилитель мощности,
СЭМП — синхронный электромеханический преобразователь (синхронная машина), ДПР — датчик положения ротора.
Двигатель состоит из постоянного магнита-ротора, вращающегося в магнитном поле катушек статора, по которым проходит ток, коммутируемый ключами (вентилями), управляемыми микроконтроллером. Микроконтроллер переключает катушки таким образом, чтобы взаимодействие их поля с полем ротора создавало крутящий момент при любом его положении.
На входы преобразователя координат (ПК) поступают напряжения постоянного тока , действие которого аналогично напряжению якоря двигателя постоянного тока, и , аналогичное напряжению возбуждения двигателя постоянного тока (аналогия действует при рассмотрении схемы независимого возбуждения двигателя постоянного тока).
Сигналы , представляют собой проекции вектора напряжения управления на оси вращающейся системы координат , связанной с ротором ВД (а точнее — с вектором потока ротора). Преобразователь координат осуществляет преобразование проекций в проекции неподвижной системы координат , связанной со статором.
Как правило, в системах управления электропривода задаётся , при этом уравнения преобразования координат принимают вид:
где — угол поворота ротора (и системы вращающихся координат) относительно оси неподвижной системы координат. Для измерения мгновенного значения угла на валу ВД устанавливается датчик положения ротора (ДПР).
По сути, является в этом случае заданием значения амплитуды фазных напряжений. А ПК, осуществляя позиционную модуляцию сигнала , формирует гармонические сигналы , которые усилитель мощности (УМ) преобразует в фазные напряжения . Синхронный двигатель в составе вентильного двигателя часто называют синхронным электромеханическим преобразователем (СЭМП).
Как правило, электронная часть ВД коммутирует фазы статора синхронной машины так, чтобы вектор магнитного потока статора был ортогонален вектору магнитного потока ротора (т. н. векторное управление). При соблюдении ортогональности потоков статора и ротора обеспечивается поддержание максимального вращающего момента ВД в условиях изменения частоты вращения, что предотвращает выпадение ротора из синхронизма и обеспечивает работу синхронной машины с максимально возможным для неё КПД. Для определения текущего положения потока ротора вместо датчика положения ротора могут использоваться токовые датчики (косвенное измерение положения).
Электронная часть современного ВД содержит микроконтроллер и транзисторный мост, а для формирования фазных токов используется принцип широтно-импульсной модуляции (ШИМ). Микроконтроллер отслеживает соблюдение заданных законов управления, а также производит диагностику системы и её программную защиту от аварийных ситуаций.
Иногда датчик положения ротора отсутствует, а положение оценивается системой управления по измерениям токовых датчиков с помощью наблюдателей (т. н. «бездатчиковое» управление ВД). В таких случаях за счёт удаления дорогостоящего и зачастую громоздкого датчика положения уменьшается цена и массо-габаритные показатели электропривода с ВД, однако усложняется управление, снижается точность определения положения и скорости.
В приложениях средней и большой мощности в систему могут дополнительно включаться электрические фильтры для смягчения негативных эффектов ШИМ: перенапряжений на обмотках, подшипниковых токов и снижения КПД. Впрочем, это характерно для всех типов двигателей.
Возможные варианты и специальные случаи
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Типы двигателей постоянного тока
Двигатель постоянного тока, является наиболее часто используемым приводом для создания непрерывного движения, скорость вращения которого легко регулируется, что делает их идеальными для использования в устройствах, таких как регулирование скорости, управление сервоприводом и / или требуется позиционирование. Двигатель постоянного тока состоит из двух частей: «Статор», который является неподвижной частью, и «Ротор», который является вращающейся частью. В результате доступно три типа двигателей постоянного тока.
- Коллекторный двигатель — этот тип двигателя создает магнитное поле в намотанном роторе (вращающаяся деталь), пропуская электрический ток через узел коммутатора и угольной щетки, отсюда и термин «щеточный». Магнитное поле статоров (неподвижная часть) создается с помощью обмотки статора или постоянных магнитов. Обычно моторы с щеткой постоянного тока дешевые, маленькие и легко управляемые.
- Бесколлекторный двигатель — этот тип двигателя создает магнитное поле в роторе, используя постоянные магниты, прикрепленные к нему, и коммутация достигается с помощью электроники. Они, как правило, меньше, но дороже, чем обычные двигатели постоянного тока щеточного типа, потому что они используют переключатели «эффекта Холла» в статоре для получения требуемой последовательности вращения поля статора, но они имеют лучшие характеристики крутящего момента / скорости, более эффективны и имеют более длительный срок эксплуатации. чем эквивалентные коллекторные типы.
- Серводвигатель — этот тип двигателя в основном представляет собой коллекторный двигатель постоянного тока с некоторой формой управления позиционной обратной связью, подключенной к валу ротора. Они подключены к контроллеру типа ШИМ и управляются им, и в основном используются в системах позиционного управления и радиоуправляемых моделях.
Обычные двигатели постоянного тока имеют почти линейные характеристики, скорость вращения которых определяется приложенным напряжением постоянного тока, а их выходной крутящий момент определяется током, протекающим через обмотки двигателя. Скорость вращения любого двигателя постоянного тока может варьироваться от нескольких оборотов в минуту (об / мин) до многих тысяч оборотов в минуту, что делает их пригодными для применения в электронике, автомобилестроении или робототехнике. При подключении их к коробкам передач или зубчатым передачам их выходная скорость может быть уменьшена, в то же время увеличивая крутящий момент двигателя на высокой скорости.
Коллекторный двигатель постоянного тока
Стандартный коллекторный двигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого статором, и внутренней части, которая вращается, создавая движение, называемое ротором или «арматурой» для машин постоянного тока.
Обмотка статора двигателя представляет собой электромагнитную цепь, которая состоит из электрических катушек, соединенных вместе в круговую конфигурацию для создания необходимого северного полюса, затем южного полюса, затем северного полюса и т.д., типа стационарной системы магнитного поля для вращения, в отличие от машин переменного тока, чье поле статора постоянно вращается с приложенной частотой. Ток, который течет в этих полевых катушках, известен как ток поля двигателя.
Эти электромагнитные катушки, которые формируют поле статора, могут быть электрически соединены последовательно, параллельно или вместе с ротором двигателя. Последовательно намотанный двигатель постоянного тока имеет обмотки статора, соединенные последовательно с ротором. Аналогично, двигатель постоянного тока с шунтирующим витком имеет свои обмотки возбуждения статора, соединенные параллельно с ротором, как показано ниже.
Ротор постоянного тока состоит из токонесущих проводников, соединенных вместе на одном конце с электрически изолированными медными сегментами, называемыми коммутатором. Коммутатор позволяет осуществлять электрическое подключение через угольные щетки (отсюда и название «щеточный» двигатель) к внешнему источнику питания при вращении ротора.
Установленное ротором магнитное поле пытается выровнять себя с полем статора, заставляя ротор вращаться вокруг своей оси, но не может выровняться из-за задержек коммутации. Скорость вращения двигателя зависит от силы магнитного поля роторов, и чем больше напряжение подается на двигатель, тем быстрее вращается ротор. Изменяя это приложенное постоянное напряжение, можно также изменять частоту вращения двигателя.
Двигатель постоянного тока с щеточным постоянным магнитом (PMDC), как правило, намного меньше и дешевле, чем его эквивалентные родственники двигателя постоянного тока с обмоткой статора, поскольку они не имеют обмотки возбуждения. В двигателях с постоянными магнитами постоянного тока (PMDC) эти полевые катушки заменяются сильными магнитами типа редкоземельных элементов (например, самарий-коболт или неодим-железо-бор), которые имеют очень сильные магнитные энергетические поля.
Использование постоянных магнитов дает двигателю постоянного тока намного лучшую линейную характеристику скорости / крутящего момента, чем эквивалентные намотанные двигатели из-за постоянного и иногда очень сильного магнитного поля, что делает их более подходящими для использования в моделях, робототехнике и сервоприводах.
Хотя щеточные электродвигатели постоянного тока очень эффективны и дешевы, проблемы, связанные с щеточным электродвигателем постоянного тока, заключаются в том, что искрение возникает в условиях большой нагрузки между двумя поверхностями коммутатора и угольных щеток, что приводит к самогенерированию тепла, короткому сроку службы и электрическому шуму из-за искрения, что может повредить любое полупроводниковое коммутационное устройство, такое как МОП-транзистор или транзистор. Чтобы преодолеть эти недостатки, были разработаны бесщеточные или бесколлекторные двигатели постоянного тока.
Бесколлекторный двигатель постоянного тока
Бесщеточный (бесколлекторный) двигатель постоянного тока (BDCM) очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора. Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей. Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Тогда конструкция бесщеточного двигателя постоянного тока очень похожа на двигатель переменного тока, что делает его истинным синхронным двигателем, но одним недостатком является то, что он дороже, чем аналогичная конструкция «щеточного» двигателя.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Самым распространенным датчиком положения / полюса является «Датчик Холла», но некоторые двигатели также используют оптические датчики.
При использовании датчиков с эффектом Холла полярность электромагнитов переключается с помощью схемы управления двигателем. Тогда двигатель можно легко синхронизировать с цифровым тактовым сигналом, обеспечивая точное управление скоростью. Бесщеточные двигатели постоянного тока могут быть сконструированы так, чтобы иметь внешний ротор с постоянными магнитами и внутренний статор электромагнита или внутренний ротор с постоянными магнитами и внешний статор электромагнита.
Преимущества бесщеточного двигателя постоянного тока по сравнению с его «щеточным» кузеном заключаются в более высокой эффективности, высокой надежности, низком электрическом шуме, хорошем контроле скорости и, что более важно, отсутствии износа щеток или коммутатора, что обеспечивает значительно более высокую скорость. Однако их недостатком является то, что они более дороги и сложнее в управлении.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбуждения
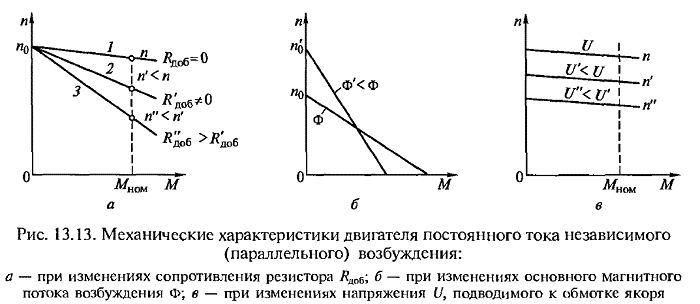
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
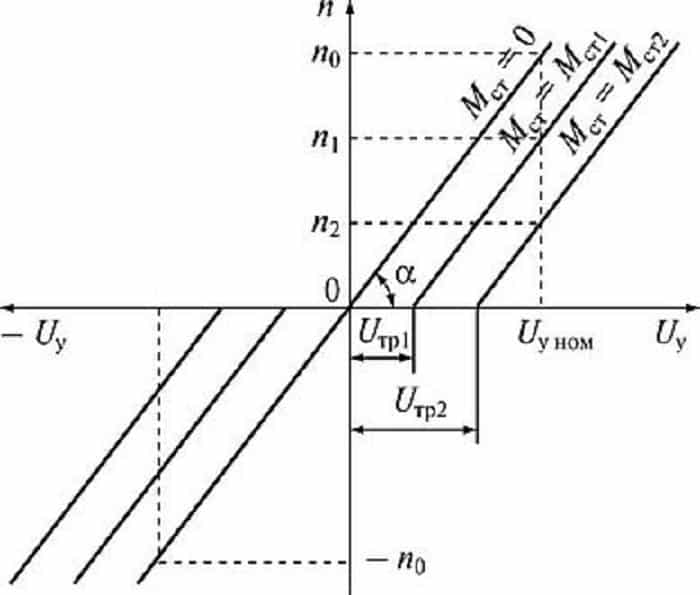 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
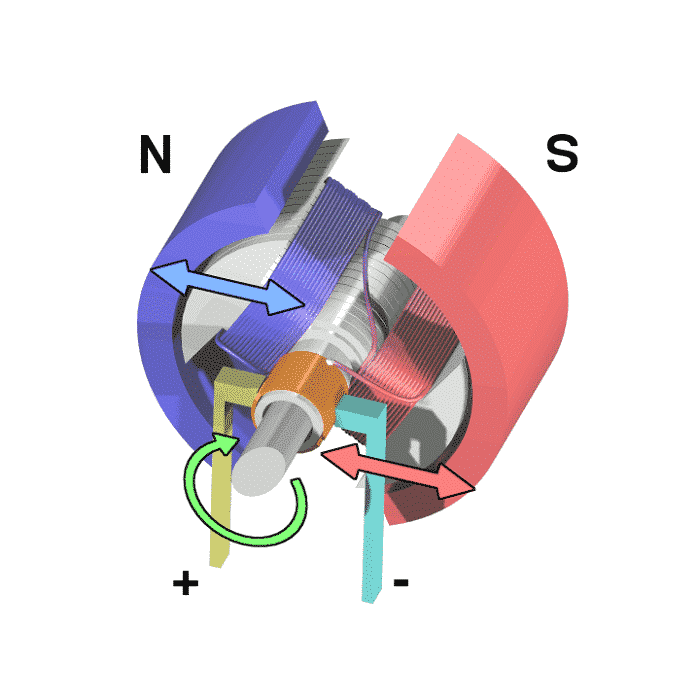 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
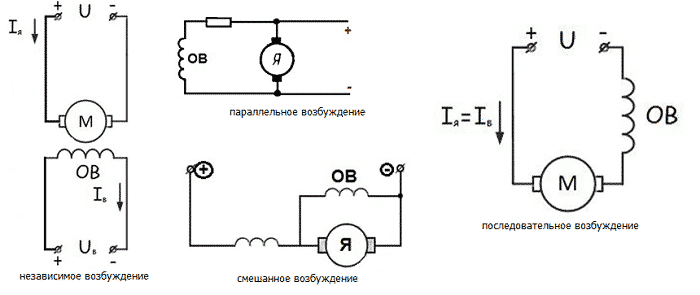 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками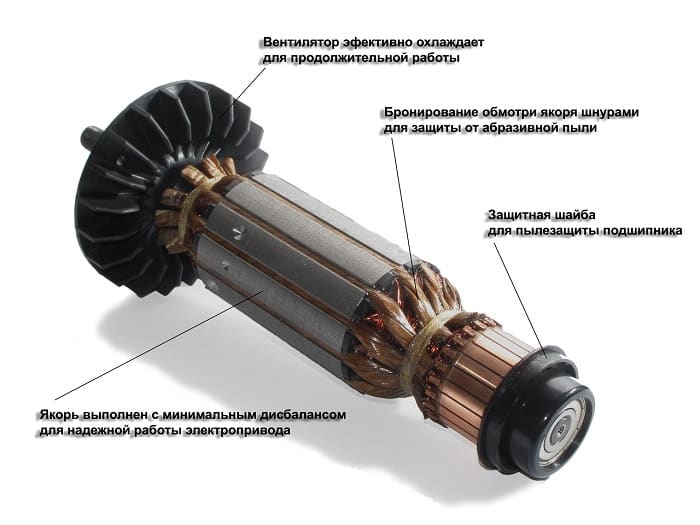 Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
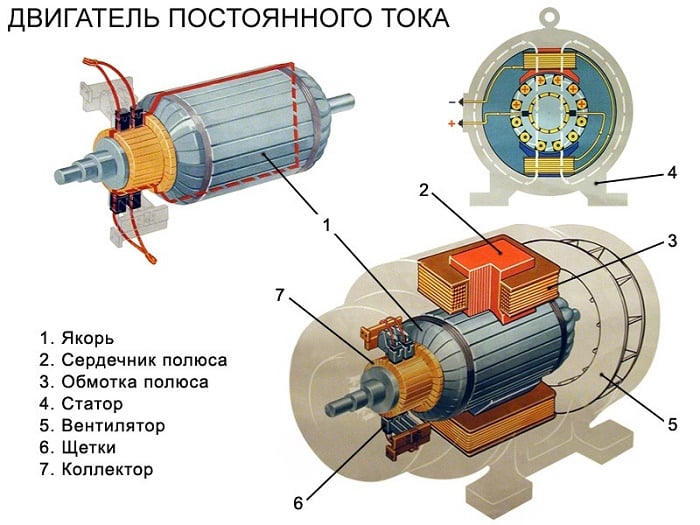 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока
Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.
Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Контроль скорости двигателя
Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:
и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).