В данной статье мы подробно рассмотрим двигатели постоянного тока. Детально разберем типы и принцип работы данных двигателей. Расскажем как происходит переключение и контролирование двигателя, контролирования скорости и регулировка скорости импульса, а так же опишем как изменить направление вращения двигателя постоянного тока разными методами.
Описание и принцип работы
Электрические двигатели постоянного тока — это непрерывные приводы, которые преобразуют электрическую энергию в механическую. Двигатель постоянного тока достигает этого, создавая непрерывное угловое вращение, которое можно использовать для вращения насосов, вентиляторов, компрессоров, колес и т.д. Купить двигатель постоянного тока вы можете на Алиэкспресс:
Наряду с обычными роторными двигателями постоянного тока имеются также линейные двигатели, способные производить непрерывное движение вкладыша. Существуют в основном три типа обычных электрических двигателей: двигатели переменного тока, двигатели постоянного тока и шаговые двигатели.
Двигатели переменного тока, как правило, используются в однофазных или многофазных промышленных мощных установках, в которых постоянный крутящий момент и скорость требуются для управления большими нагрузками, такими как вентиляторы или насосы.
В этом уроке по электродвигателям мы рассмотрим только простые двигатели постоянного тока и шаговые двигатели, которые используются во многих различных типах электронных схем, систем позиционного управления, микропроцессоров, PIC и роботизированных схем.
Какое приводное решение выбрать — DC или AC?
Силовые статические преобразователи на базе микропроцессоров, применяемые как в приводах переменного, так и постоянного тока, в настоящее время достигли очень высокого технического уровня, который (в допустимых технологических пределах) в большинстве приложений позволяет использовать электропривод переменного тока, там где раньше применялся привод постоянного тока. Однако, традиционный привод постоянного тока (1-но и 4-х квадрантный) продолжает играть важную роль, особенно в тех приложениях, где нужно обеспечить высокодинамичные режимы с постоянным моментом вращения, жесткими требованиями по перегрузочной способности в широком диапазоне скоростей и рекуперацию энергии обратно в сеть.
Таблица классификации электронных двигателей:

Главные критерии выбора
Первое, что должен сделать пользователь, это объективно оценить варианты, предлагаемые на рынке регулируемых приводов, технически соответствующие требованиям прикладной задачи/процесса. Главными критериями этой оценки должны быть:
1. Совокупная стоимость закупки регулируемого привода и требуемого дополнительного оборудования
2. Текущие эксплуатационные расходы:
- обслуживание;
- производственные издержки, КПД, и т.д;
- требуемая площадь размещения.
3. Технологические и инновационные аспекты:
- динамический отклик, время разгона; 4-х квадрантные операции; аварийный стоп, и т.д.
- массо-габаритные характеристики.
4. Эксплуатационная надежность, пригодность приводов:
- соответствие международным требованиям и стандартам IEC, ГОСТ Р, EN, CE-EMC; CSA, UL, и т.д.;
- условия окружающей среды; степень защиты корпуса; ремонт «по-месту»
5. Воздействие на внешнюю среду:
- искажение сетевого напряжения
- ЭМС
6. Требуемое пространство для преобразователя и двигателя
7. Отвод тепла
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в ртуть. Постоянный магнит был установлен в середине ванны со ртутью. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, вместо токсичной ртути используют электролит. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности.
Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русско-прусский учёный Б.С. Якоби пошёл иным путём. В 1834 г. он создал первый в мире практически пригодный электродвигатель со вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б.С. Якоби писал, что его двигатель несложен и «даёт непосредственно круговое движение, которое гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось восемь раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременно притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довёл мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
В 1839 г. Якоби построил лодку с электромагнитным двигателем, который от 69 элементов Грове развивал 1 лошадиную силу и двигал лодку с 14 пассажирами по Неве против течения. Это было первое применение электромагнетизма к передвижению в больших размерах.
Сравнение основных характеристик приводов постоянного и переменного тока в промышленном применении
Сравнение проводится между 6-пульсными 3-фазными тиристорными приводами постоянного тока с независимым возбуждением и 3-фазными электроприводами переменного тока на базе преобразователя частоты с широтно-импульсной модуляцией и асинхронного двигателя , в следующих типовых категориях:
ППТ — P = 11 kW … 5200 kW; U = 200 V … 1190 V
ЧРП — P = 0.75 kW … 2000 kW; U = 380 V … 690 V
Привод постоянного тока
Частотно-регулируемый привод
В первом приближении существенных отличий между этими приводами не так и много; однако, при более детальном рассмотрении, выявляются характерные особенности приводов и различие физических принципов функционирования. Дале в статье раскрываются аспекты отличия приводов по следующим пунктам:
- характеристики двигателей, как электромеханических преобразователей
- характеристики преобразователей электрической энергии
- 4-х квадрантные приводы
- влияние на внешнюю среду
- модернизация приводов постоянного тока
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
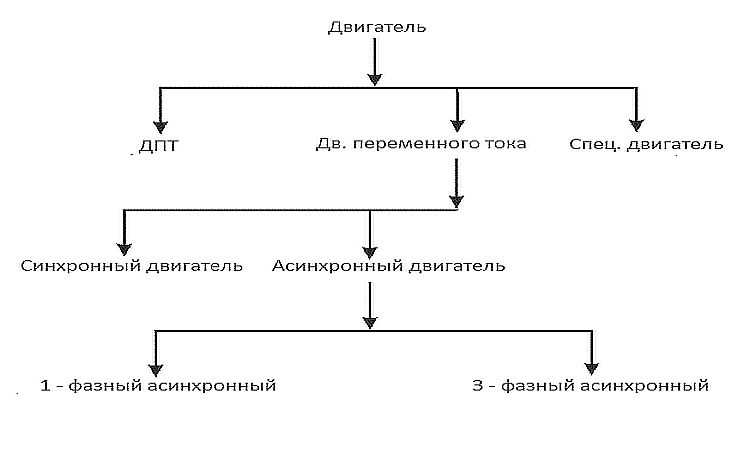
Виды электродвигателей: классификация
Жёсткой классификации электродвигателей нет, но различать их можно по нескольким параметрам. Основные – тип питания и наличие скользящего контакта. Эти позиции можно считать ключевыми и по ним проще ориентироваться. В общем-то, видов электродвигателей не так и много – синхронные, асинхронные, постоянного тока, вентильные. Вот, пожалуй, всё. Другое дело, что в большинстве «категорий» есть достаточно вариантов, которые значительно меняют свойства и характеристики. Но с этим придётся разбираться применительно к каждой конструкции.

Электрические двигатели отличаются типом питания, устройством и назначением
Итак, рассмотрим виды электродвигателей по виду питающего напряжения. Они бывают:
- постоянного тока;
- переменного тока:
- однофазное питание;
- трехфазное питание;
- универсальные.
Пояснений требует только универсальный тип. Такой электродвигатель может работать как от постоянного, так и от переменного напряжения. По сути, один вид – универсальный коллекторный двигатель с обмотками возбуждения. К двигателям переменного тока относятся синхронные, асинхронные. На постоянном токе работают коллекторные и вентильные.
Наиболее распространённые виды электродвигателей
По способу передачи электропитания все электродвигатели можно разделить на две группы:
- с коллектором (щёточные);
- без коллектора (бесщёточные).
Бесщёточные электродвигатели требуют меньше обслуживания, работают тише, более надёжны. К ним относятся асинхронные с короткозамкнутым ротором (работают от переменного напряжения), вентильные (питаются постоянным напряжением). Остальные имеют коллектор и щётки, через которые на обмотки катушек подаётся напряжение.
Электродвигатель у бактерий
Электродвигатель из нескольких белковых молекул преобразует энергию электрического тока в виде движения протонов во вращение жгутика, используемого для передвижения некоторыми видами бактерий.
Серводвигатель постоянного тока
Серводвигатели постоянного тока используются в системах с замкнутым контуром, в которых положение выходного вала двигателя возвращается обратно в цепь управления двигателем. Типичные позиционные устройства «обратной связи» включают в себя резольверы, энкодеры и потенциометры, используемые в моделях радиоуправления, таких как самолеты, лодки и т.д.
Серводвигатель, как правило, включает в себя встроенную коробку передач для снижения скорости и способен напрямую выдавать высокие крутящие моменты. Выходной вал серводвигателя не вращается свободно, как валы двигателей постоянного тока из-за присоединения редуктора и устройств обратной связи.
Блок-схема серводвигателя постоянного тока
Серводвигатель состоит из двигателя постоянного тока, редуктора, устройства позиционной обратной связи и некоторой формы коррекции ошибок. Скорость или положение контролируется по отношению к позиционному сигналу входного сигнала или опорного приложенному к устройству.
Усилитель обнаружения ошибок просматривает этот входной сигнал и сравнивает его с сигналом обратной связи с выходного вала двигателя и определяет, находится ли выходной вал двигателя в состоянии ошибки, и, если это так, контроллер вносит соответствующие исправления, либо ускоряя двигатель, либо замедляя его вниз. Эта реакция на устройство позиционной обратной связи означает, что серводвигатель работает в «замкнутой системе».
Наряду с крупными промышленными применениями серводвигатели также используются в небольших моделях с дистанционным управлением и робототехнике, причем большинство серводвигателей способны вращаться примерно на 180 градусов в обоих направлениях, что делает их идеальными для точного углового позиционирования. Тем не менее, эти сервоприводы типа RC не могут непрерывно вращаться на высокой скорости, как обычные двигатели постоянного тока, если специально не модифицированы.
Серводвигатель состоит из нескольких устройств в одном корпусе, двигателя, коробки передач, устройства обратной связи и коррекции ошибок для контроля положения, направления или скорости. Они широко используются в робототехнике и небольших моделях, так как ими легко управлять, используя всего три провода: питание , заземление и управление сигналами.
Переключение и контроль двигателя постоянного тока
Небольшие двигатели постоянного тока могут быть включены «Вкл» или выключены «Выкл» с помощью переключателей, реле, транзисторов или МОП-транзисторов, причем простейшей формой управления двигателем является «линейное» управление. Схема этого типа использует биполярный транзистор в качестве переключателя (транзистор Дарлингтона также может использоваться, если требуется более высокий номинальный ток) для управления двигателем от одного источника питания.
Изменяя величину тока базы, протекающего в транзистор, можно управлять скоростью двигателя, например, если транзистор включен наполовину, тогда только половина напряжения питания поступает на двигатель. Если транзистор включен полностью (насыщен), то все напряжение питания поступает на двигатель и вращается быстрее. Затем для этого линейного типа управления мощность постоянно подается на двигатель, как показано ниже.
Модернизация существующих приводов постоянного тока
Когда возникает вопрос о том, стоит ли модернизировать существующий привод постоянного тока или дешевле его полностью заменить на электропривод переменного тока, надо подойти к этому вопросу взвешенно и рассмотреть все аргументы и «за» и «против».
В основном доступно несколько уровней модернизации:
- Полная замена привода постоянного тока (преобразователя и двигателя) на новый современный привод постоянного тока.
- Замена только преобразователя, если двигатель в хорошем состоянии.
- Замена одного из модулей преобразователя на новый.
- Замена аналоговой управляющей электроники на цифровую без изменения силовой части (рекомендуется только на мощностях более 1 МВт).
- Полная замена всей приводной системы на частотно-регулируемый привод.
Отвечая на вопрос, о том какой подход выбрать в каждом конкретном случае, важно оценить ряд критериев:
- Может ли появиться потребность в изменении привода в будущем (изменяться тип или характер нагрузки, условия эксплуатации, и т.д.)?
- В каком состоянии находятся индивидуальные компоненты системы (надежность, возраст, эксплуатационные затраты)?
- До принятия решения о замене привода постоянного тока на ЧРП учтите следующие пункты:
- Издержки на прокладку новых кабелей.
- Место для размещения преобразователя частоты.
- Потребуется ли замена коммутационной аппаратуры?
- Возможность и сложность механического монтажа нового двигателя
- Продолжительность всех работ по замене приводов./>
Контроль скорости двигателя
Простая схема переключения, приведенная выше, показывает схему для однонаправленной (только в одном направлении) цепи управления скоростью двигателя. Поскольку скорость вращения двигателя постоянного тока пропорциональна напряжению на его клеммах, мы можем регулировать это напряжение на клеммах с помощью транзистора.
Два транзистора соединены в виде пары Дарлингтона для управления током основного ротора двигателя. 5 кОм потенциометр используется для регулирования количества базового привода на первый пилот — транзистора TR 1 , который, в свою очередь, контролирует главный коммутационный транзистор TR 2 , позволяя изменять напряжение постоянного тока двигателя от нуля до Vcc, в этом примере от 9 до 12 вольт.
Опциональные диоды маховика подключены к переключающему транзистору TR 2 и клеммам двигателя для защиты от любой обратной ЭДС, создаваемой двигателем при его вращении. Регулируемый потенциометр может быть заменен непрерывным логическим «1» или логическим «0» сигналом, подаваемым непосредственно на вход цепи, чтобы переключить двигатель «полностью включено» (насыщение) или «полностью выключено» (отключение) соответственно из порта микроконтроллера или ПОС.
Наряду с этим базовым контролем скорости, та же схема также может использоваться для управления скоростью вращения двигателей. Путем многократного переключения тока двигателя «ВКЛ» и «ВЫКЛ» на достаточно высокой частоте, скорость двигателя можно варьировать от состояния покоя (0 об / мин) до полной скорости (100%), изменяя отношение бестокового пространства к его запасу. Это достигается путем изменения соотношения времени включения (t ON ) и времени выключения (t OFF ), и это может быть достигнуто с помощью процесса, известного как широтно-импульсная модуляция (ШИМ).
Сравнение цен приводных систем постоянного и переменного тока
(преобразователь + двигатель или полный шкаф управления + двигателя)
На основании сегодняшних цен на приводы постоянного и переменного тока, с учетом указанных выше преимуществ и недостатков различных решений, можно руководствоваться следующей оценкой:
1-квадрантные приводы < 40…80 кВт → ЧРП менее дорогие
4-квадрантные приводы < 40…60 кВт
(Преобразователь частоты + тормозной (модуль) резистор); → ППТ менее дорогие
Рекуперативные 4-квадрантные приводы > 15 kW → ППТ менее дорогие
Регулировка скорости импульса
Ранее мы говорили, что скорость вращения двигателя постоянного тока прямо пропорциональна среднему значению напряжения на его клеммах, и чем выше это значение, вплоть до максимально допустимого напряжения двигателя, тем быстрее будет вращаться двигатель. Другими словами, больше напряжения, больше скорости. Изменяя соотношение между временем «ВКЛ» (t ВКЛ ) и временем «ВЫКЛ» (t ВЫКЛ ), которое называется «Коэффициент заполнения», или «Рабочий цикл», среднее значение напряжения двигателя и, следовательно, его скорость вращения может варьироваться. Для простых униполярных приводов коэффициент заполнения β задается как:
и среднее выходное напряжение постоянного тока, подаваемое на двигатель, определяется как: Vmean = β x Vsupply. Затем, изменяя ширину импульса а, можно управлять напряжением двигателя и, следовательно, мощностью, подаваемой на двигатель, и этот тип управления называется широтно-импульсной модуляцией или ШИМ.
Другим способом управления частотой вращения двигателя является изменение частоты (и, следовательно, периода времени управляющего напряжения), в то время как времена коэффициента включения «ВКЛ» и «ВЫКЛ» поддерживаются постоянными. Этот тип управления называется частотно-импульсной модуляцией или PFM .
При частотно-импульсной модуляции напряжение двигателя регулируется путем подачи импульсов переменной частоты, например, на низкой частоте или с очень небольшим количеством импульсов, среднее напряжение, подаваемое на двигатель, является низким, и, следовательно, скорость двигателя является низкой. При более высокой частоте или множестве импульсов среднее напряжение на клеммах двигателя увеличивается, и скорость двигателя также увеличивается.
Затем транзисторы можно использовать для управления количеством энергии, подаваемой на двигатель постоянного тока с режимом работы: «линейная» (изменение напряжения двигателя), «широтно-импульсная модуляция» (изменение ширины импульса) или «частотно — импульсная модуляция»(изменение частоты импульса).